[汽車之家 行業動態] 7月8日,中國汽車技術研究中心有限公司、清華大學、華為技術有限公司三方聯合編寫的《汽車智能駕駛技術及產業發展白皮書》正式發布。此書從“產學研”角度聯合研判汽車智能駕駛產業發展趨勢,明晰智能駕駛發展過程中相關易錯、易混的概念,分析智能駕駛相關技術原理與發展水平,研究智能駕駛安全體系建設要求,明確智能駕駛技術產業政策法規與合規要求,闡述以智能駕駛技術為核心的整車智能化路線演變方向。

此書包含“智能駕駛概念與發展辨析”、“智能駕駛技術架構與關鍵能力”、“智能駕駛行業賦能與場景創新”、“自動駕駛安全體系”、“智能駕駛產業環境與生態構建”、“智能駕駛產業未來展望”幾大篇章。
智能駕駛的概念分類
基于工信部牽頭制定的GB/T 40429—2021《汽車駕駛自動化分級》,再次明確駕駛自動化0-5級的分類,并且對于當前的技術階段再次對于2級和3級駕駛自動化進行明確。2級與3級駕駛自動化的核心差異點在于責任主體、系統能力和駕駛員狀態監測三個方面,2級車輛能夠同時自動進行持續的橫向和縱向控制,即車輛具備自動加速、減速以及轉向等功能,但駕駛員仍需時刻保持注意力,對車輛進行監督,并在必要時干預車輛,責任主體為駕駛員;3級駕駛自動化的核心特征是在特定設計運行條件(ODD)下,系統可執行全部動態駕駛任務(如高速公路、城市道路等),允許駕駛員在系統運行期間不再持續監管道路環境,可進行有限度的非駕駛活動,但需在系統請求時進行接管,如果3級系統激活期間發生問題,經相關部門認定后,應由責任方承擔責任。

截至到本白皮書發布日期,市場上汽車產品均處于2級駕駛自動化及以下階段,沒有達到3級駕駛自動化程度。根據現行交通法規及技術標準,2級駕駛自動化階段運行必須處于人類駕駛員的持續監管之下,操作主體是駕駛員,若發生交通事故,駕駛員須承擔法定責任。盡管標準中已經對駕駛自動化等級做了詳細的定義、解釋以及邊界范圍的限定,但在汽車市場的宣傳與傳播中,仍存在對上述概念混淆使用的亂象,有必要理清相關概念。
此外,也強調了智能駕駛的邏輯架構的概念和數據是智能駕駛發展的核心的發展路徑。
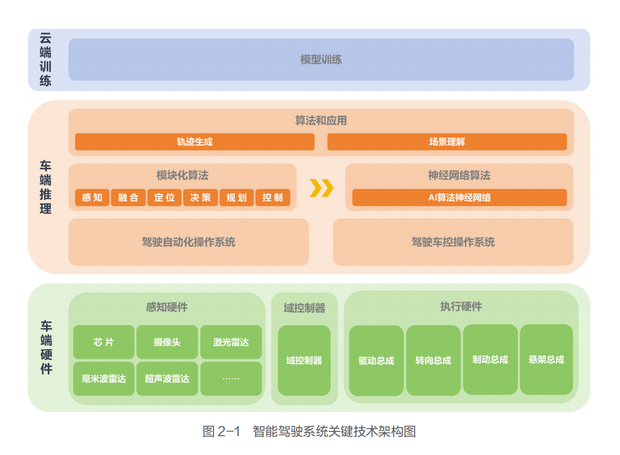
智能駕駛技術架構與關鍵能力
一、車端硬件
感知硬件
在白皮書第二章中提到:汽車智能駕駛行業中存在技術過度化營銷的現象,其核心癥結在于技術參數的片面傳播與系統價值的認知錯位。一是算力參數的孤立化傳播。智能駕駛系統的成熟度更取決于算法迭代能力、數據閉環體系、功能安全設計等深層技術要素的有機融合,算力硬件作為基礎支撐平臺固然重要,但必須與場景理解算法、海量數據訓練驗證、多層級安全冗余等系統化工程能力形成協同,才能真正實現安全可靠的駕駛體驗。二是市場認知呈現斷層式割裂。普通消費者受限于技術背景,難以分辨算力數值與實際場景處理能力的差異,易被營銷話術引導,導致選購決策與真實需求錯配。這些現象不僅導致關鍵參數的市場認知混亂,更引發了無序競爭等市場失范問題,亟需行業合力攜手構建技術科普體系,明確算力指標與實際性能的映射關系,解析智能駕駛系統技術邏輯,幫助用戶建立包含硬件性能、算法成熟度與數據服務能力的認知框架,推動智能駕駛行業從“參數競爭”轉向“價值競爭”轉變。下表為主流傳感器的行業水平參考信息:
1、攝像頭關鍵參數及行業水平
|
參數分類 |
行業優秀水平 |
參數說明 |
|
像素( px ) |
前視≥ 8 millions、側視≥ 2 millions 環視≥ 2 millions、后視≥ 2 millions |
圖像像素越大分辨率越高,但分辨率過大對目標識 別提升有限且算力消耗大 |
|
幀率(fps) |
前視≥ 30、側視≥ 30 環視≥ 20、后視≥ 20 |
攝像頭每秒能記錄或顯示的圖像數量,越大畫面實 時性越高、提供的信息越精細,但幀率過大對目標 識別提升有限且算力消耗大 |
2、激光雷達關鍵參數及行業水平
|
參數分類 |
行業優秀水平 |
參數說明 |
|
探測距離 |
≥ 200 m@10% 反射率 |
理論可以測量物體的最大距離,距離越遠越好 |
|
線數 |
≥ 128 |
分辨率,線數越高越好 |
|
角分辨率 |
水平≤ 0.1°、垂直≤ 0.1° |
目標辨別能力,分辨率越小越好 |
|
幀率 |
≥ 10Hz |
每兩幀的時間間隔,幀率越大越好 |
3、毫米波雷達
|
參數分類 |
行業優秀水平 |
參數說明 |
|
探測距離 |
前向長距離雷達:≥ 280 m 角雷達:≥ 150 |
理論可以測量物體的最大距離,距離越遠越好 |
|
水平角分辨率 |
≤ 3° |
目標辨別能力,分辨率越小越好 |
|
垂直角分辨率 |
≤ 15° |
僅4D毫米波雷達具備俯仰角測量能力 |
|
視場角 |
前向長距離雷達:水平 FOV ≥ 120°、垂直 |
探測覆蓋范圍,視場角越大越好 |
|
速度測量精度 |
≤ 0.1 m/s(勻速目標),≤ 0.5 m/s(急加速目標) |
目標測速能力,精度越小越好 |
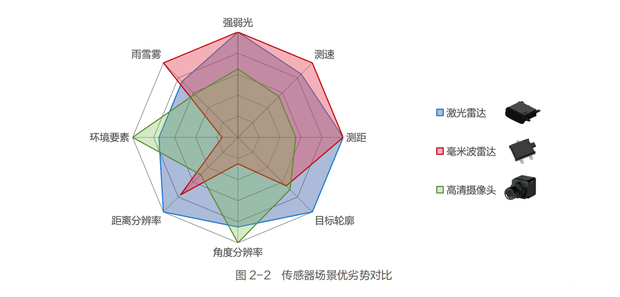
根據參與感知部件的不同,感知技術方案主要分為三類:
一是純視覺方案。純視覺方案依賴攝像頭作為核心感知硬件,通過圖像處理、深度學習算法實現環境感知,并不依賴雷達、激光雷達等其他主動式傳感器。純視覺方案對于交通要素識別能力好,但是受光照、極端天氣影響較大,適合環境相對簡單的駕駛場景,純視覺方案類似于人眼觀察能力,可以達到類人駕駛水平。
二是主視覺方案。主視覺方案以攝像頭為核心感知單元,輔以少量超聲波雷達、短距毫米波雷達等傳感器,形成“視覺為主,其他傳感器為輔”的輕量融合方案。主視覺方案的核心決策仍依賴視覺數據,輔助傳感器僅用于補充特定場景,如近距離盲區、低速泊車等典型場景,更加適應城區等復雜路況,是在純視覺方案基礎上的補盲,未來可以達到老司機駕駛水平。
三是多傳感器融合方案。多傳感器融合方案整合多種異構傳感器,如攝像頭毫米波雷達、超聲波雷達、激光雷達等傳感器實現環境感知,各傳感器優勢互補,對于環境、天氣適應性更強,擁有更高的安全性能,未來可以實現超人的駕駛水平。
域控制器
域控制器是智能駕駛系統的傳感器接入與車端推理算法運行的硬件平臺,是智能駕駛系統運行的核心部件,運行智能駕駛系統推理算法,需要強大的NPU與CPU算力,業界一般是集成為一顆SoC中,計算SoC的算力大小對智能駕駛推理算法的部署與運行效果至關重要。當前2級智能駕駛主流場景下,現有50~200TOPS稠密算力水平已經可以滿足實際運行需求,過度堆砌算力反而會造成資源浪費與成本增加。以人工智能領域為例,ChatGPT-O1憑借1.7萬億參數構建龐大模型體系,卻被 DeepSeek-R1以更高效的算法架構與算力利用方式實現超越,計算資源需求僅為Chat GPT的1%左右。這一案例充分證明,算力規模并非決定技術表現的唯一要素,算法優化與算力利用效率提升同樣關鍵。
|
等級 |
車端算力要求 |
可以滿足的功能 |
|
2 級 |
≥ 50 TOPS(稠密) |
ACC、LCC、APA、AVP、RPA、高速領航輔助駕駛、城區 領航輔助駕駛 |
|
3 級 |
≥ 200 TOPS(稠密) |
ACC、LCC、APA、AVP、RPA、TJP、高速有條件自動駕 駛、城區有條件自動駕駛,雙冗余 & 高可靠 |
|
4 級 |
≥ 1000 TOPS(稠密) |
ACC、LCC、APA、AVP、RPA、TJP、高速自動駕駛、城 區自動駕駛,園區自動駕駛、全冗余 & 高可靠 |
|
5 級 |
≥ 2000 TOPS(稠密) |
任意點到任意點,全冗余 & 高可靠 |
回歸智能駕駛領域,2級智能駕駛對算力的需求約為≥ 50TOPS稠密算力,3 級則提升至≥ 200TOPS稠密算力,4級提升至≥ 1000TOPS 稠密算力,5級可能將提升至≥ 2000TOPS稠密算力的水平。目前,多數企業已達成對應算力能力,盲目追求算力峰值既無必要,也不符合成本效益原則,行業發展的重點應轉向算力資源的精細化管理與優化配置,通過算法迭代、軟硬件協同設計等手段,實現功能體驗升級與成本控制的動態平衡,推動智能駕駛技術向更高效、可持續的方向發展。對于車端推理算力而言,行業需明確稠密算力與稀疏算力的宣傳口徑。從數據結構特性與計算模式維度的不同,可分為稠密算力與稀疏算力,二者有著本質區別,不可混淆或簡單等同。
執行硬件
執行硬件包含驅動總成、轉向總成、制動總成、懸架總成。經過感知硬件實時采集環境數據與智能駕駛算法計算后,預先調節執行各總成的控制參數,以實現驅動力精 確控制、轉向力自適應調節、懸架剛度與阻尼實時優化,以及制動系統快速響應等多樣化場景需求,全方位提升駕駛安全性與舒適性。
二、車端推理
隨著智能駕駛場景越來越復雜,需要更多的傳感器來滿足不同的場景要求,對于車端推理算法的要求也就越來越高。一是車端推理模型需要具備多傳感器、多模態的感知數據的并行處理能力。二是在車端推理模型與云端訓練模型的協同上,需使用專用智能駕駛云端模型提升運行效率,如以開源通用語言大模型為基模型進行二次訓練與蒸餾出的智能駕駛模型,解決模型臃腫導致的效率低、時延大的問題。
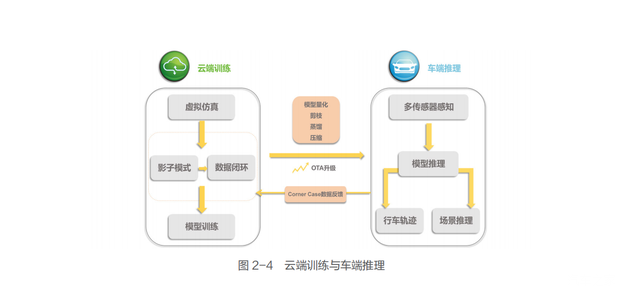
車端智能駕駛算法的實時推理計算,會輸出兩大類信息:
(1)軌跡生成:精確指揮自車當前執行硬件的操作,包括方向、速度、懸架等,實現對自車的精確控制。
(2)場景理解:預測接下來幾秒內,自車或其他交通參與要素的運動軌跡,用于人機交互顯示,以提升人機信任度與協同。
三、云端訓練
在云端超算集群通過分布式架構訓練端到端神經網絡模型,結合強化學習優化復雜決策策略,并通過模型量化、剪枝、蒸餾、壓縮等技術實現輕量化,適配車載算力平臺。
在訓練中,數據質量是算法優化的底層支撐。在汽車數據訓練體系中,數據作為算法迭代的核心生產要素,需滿足規模性、準確性、多樣性三大核心要求,共同構建模型泛化能力的底層數據基座。
訓練芯片是通過高并發的計算單元,對海量輸入數據進行高效的深度學習,形成包括大規模參數的神經網絡模型,通常采用大規模的并行計算陣列,以支持大量的矩陣運算和數據處理。在智能駕駛領域,芯片的功能細分與協同運作是實現高效決策的核心技術支撐,主要分為三種:中央處理器 CPU、圖形處理器 GPU、是神經網絡處理器NPU。云端算力是智能駕駛算法模型長期演進與迭代以及未來實現自動駕駛的重要保障,尤其是面對 AI 芯片被封鎖與制裁的背景下,云端算力儲備越多越好,但行業需澄清的幾個算力誤區:
1、行業應避免單位濫用導致的技術參數失真
2、消費者需要辨別云端算力實際情況
3、云端大算力不代表車端更新速度
當前汽車行業云端算力標注存在概念模糊等誤導性表述問題,因前綴單位差異(T/P/E/Z 級)導致終端用戶對算力規模產生認知偏差,行業亟需基于算力應用場景規范單位使用體系。
|
浮點運算單位對比 |
|||||
|
算力名稱 |
FLOPS |
TFLOPS |
PFLOPS |
EFLOPS |
ZFLOPS |
|
名詞解釋 |
浮點運算性能指 |
浮點運算性能指標; |
浮點運算性能指標; |
浮點運算性能指標; |
浮點運算性能指標; |
|
應用場景 |
基礎單位,用于 |
消費級算力核心單 |
工業級超算與中型 |
大規模 AI 訓練標 |
前沿科研與未來算 |
另外,此白皮書還針對智能駕駛行業賦能與場景創新、自動駕駛安全體系、智能駕駛產業環境與生態構建、智能駕駛產業未來展望方面進行了闡述。倡導從政策端完善法律法規體系、營造良好的創新環境;在產業端構建協同創新生態、聚焦核心技術攻關、構建風險共擔體系;在消費端提升消費者認知與教育、加強消費者權益保護,構建完善的售后服務體系。
